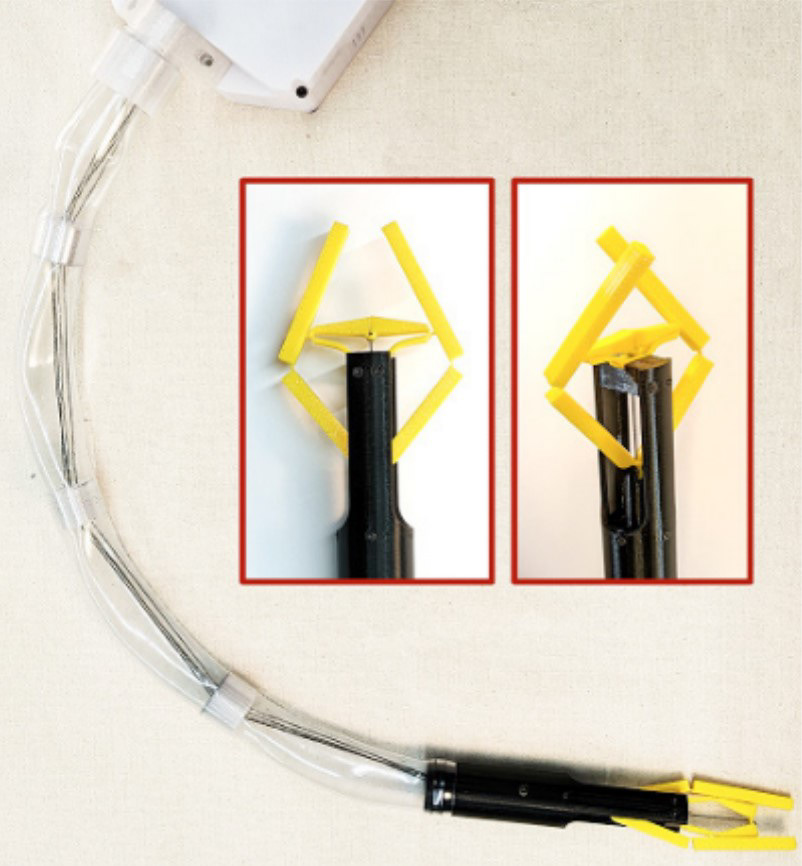
The Prototype. The end effector Head is remotely operated via strings, allowing the head to be disposed of without the electronics package, which is shown near the top.
This project was about helping robots eat Sushi. A novel design for a folding robotic gripper with in-hand manipulation ability once deployed. The design loosely mimics how Chopsticks work and can be deployed through a small incision in a body for surgery. For this project, I had the pleasure of working with the lovely Dr. Cong Wang.
The Prototype. The end effector Head is remotely operated via strings, allowing the head to be disposed of without the electronics package, which is shown near the top.